皆さんこんにちは!
8月も終わりだというのに、毎日暑い(熱い)日が続いていますね。
しかし熱いのは地上だけではありません。頭上の宙(そら)も熱い!
古川宇宙飛行士、スペースXで飛び立つ
打ち上げ成功
宇宙航空研究開発機構(JAXA)の古川聡飛行士(59)ら4人を乗せた米スペース
X社の宇宙船クールドラゴンが日本時間26日午後4時27分、米フロリダ州のケネデ
ィ宇宙センターから打ち上げられました。宇宙船は予定の軌道に投入され、打ち上げは
成功。約29時間かけて、27日に国際宇宙ステーション(ISS)に到着する見込み
です。 古川さんは2011年にロシアのソユーズ宇宙船で初飛行し、今回が2度目。
59歳での宇宙飛行は、日本人では22年の若田光一さん(60)に並び最高齢です。
古川さんは東京大病院で勤務経験がある医師で、2011年にロシアのソユーズ宇宙
船で初飛行しました。
クールドラゴン

スペースX社のクールドラゴン。ドッキングの様子。(画像:スペースX)
クルードラゴン宇宙船は、NASAのCommercial Crew Programの下、スペースX社のドラ
ゴン補給船をベースに開発した有人宇宙機です。上昇時の緊急脱出システムの装備、国際
宇宙ステーション(ISS)とのドッキング機構(無人型ではISSのロボットアームを使って
結合していましたが、ISSクルーに依存しないドッキング方式に変更)、生命維持システム
の追加など、有人機に必須の機能を追加しました。クルーは7人まで搭乗可能です。
ドラゴン宇宙船は、宇宙飛行士と与圧貨物を運ぶカプセルと非与圧サービスモジュールで
あるトランクから構成されており、カプセルは更に与圧区域、サービス区域と、軌道上に
到達した際に開き再突入時に閉じるノーズコーンに分類されます。
トランクはファルコン9ロケット搭載時におけるカプセルとロケットとの構造結合の役割
を果たすほか、無人補給ミッションに使う際には曝露機器の搭載場所となります。また、
トランクの外周にはドラゴン宇宙船への電力供給を行う太陽電池アレイや放熱のための
ラジエータが装備されており、再突入前にトランクを廃棄するまで使われます。
クルードラゴン宇宙船は、フロリダ州ケネディ宇宙センターの39A射点から、ファルコン
9ロケットの先端に搭載されて打ち上げられます。

ケネディー宇宙センターから打ち上げられます。(画像:スペースX)
クルードラゴン宇宙船のディスプレイは、リアルタイムで機体情報(位置、目的地、軌道上
の環境等)を表示し、軌道上の宇宙飛行士とカリフォルニア州ホーソーンにあるスペースX
の管制センターから監視・制御できる完全自動の宇宙船です。
ミッション終了後、クルードラゴン宇宙船は大気圏へ再突入した後、先ず小パラシュートを
展開し、4つのメインパラシュートを展開します。通常のシナリオでは、クルードラゴン宇
宙船は、フロリダ州の東沿岸沖に着水します。スペースXの回収船がクレーンで海面から吊
り上げ、船上のメインデッキに降ろします。回収船には医療設備とヘリポートも備わって
おり、着水後、宇宙飛行士に健康上の不測の事態が生じた際、救急治療や病院への搬送も
行うことができます。
インドの探査船が月の南極に着陸

街には大型の掲示板が展示されています。(画像:インド宇宙研究機構)
インドは8月23日、月の南極近くに探査機を着陸させた最初の国となり、月面へのタッチダ
ウンに成功した4番目の国となり、歴史に名を残しました。
インド宇宙研究機関(ISRO)の61億ルピー(7,300万ドル)を投じた同国3番目の月探査機チャ
ンドラヤーン3号が東部夏時間午前8時33分に軟着陸し、米国と旧ソ連、中国に次いでイン
ドが月面着陸国のリストに加わりました。
この成果は、2019年に部分的に成功したチャンドラヤーン2号ミッションに続くもので、
最終降下段階で着陸船と探査車が月面に衝突して終了。チャンドラヤーン 2 号周回機は、
1 年の設計寿命を超えても運用を続けています。この宇宙船は現在、後続のチャンドラヤ
ーン 3 号を支援するために使用されています。
インドのナレンドラ・モディ首相はミッション管制センターとのビデオ通話で、「この成
功は人類全員のものであり、将来的には他国による月面探査に役立つだろう」と述べまし
た。「グローバル・サウス諸国(インドをはじめとする新興国)を含む世界のすべての国
がそのような偉業を達成できると私は確信しています。」
インドは月探査計画に加えて、火星の周回軌道に宇宙船を投入しました。ISROのURラオ
衛星センター所長ムトゥサミー・サンカラン氏によると、次の目標は人類を宇宙に飛ばし、
金星に探査機を送ることだといいます。
月面着陸を達成するために、チャンドラヤーン 3 号のヴィクラム着陸船には、プラギャン
と呼ばれる重さ 26 kg (57 ポンド) の探査車と現場科学実験用のさまざまなペイロードが
搭載されており、午前 8 時 15 分頃に動力降下を開始しました。地表から 30 km (20 マ
イル) 上にありました。バンガロールの遠隔測定追跡および指令ネットワークからのISRO
のライブストリームによると、宇宙船は3基のエンジンを使用してゆっくりと高度を7.4km
まで下げ、速度は690秒間に1,680m/sから358m/sに減少。
粗いブレーキと細かいブレーキの両方を行った後、宇宙船は高度 800 m で垂直降下フェー
ズに入り、地表に接地するまで垂直速度と水平速度の両方をゆっくりと減速しました。
チャンドラヤーンの40日間の旅は、7月14日の打ち上げから始まった。探査機は軌道を上げ
るために5回の地球行きの操作を行った後、8月1日に月経噴射燃焼を行って月に向かう軌道
に乗せました。
チャンドラヤーン 3 号は 4 日後に月に到着し、軌道に乗りました。その後、宇宙船は徐々
に高度を下げ、飛行の最終段階に向けて位置を決めました。着陸船モジュールは8月17日に
推進モジュールから分離され、着陸試行に先立って8月20日のデブースト操縦の準備が整え
られました。
チャンドラヤーン3号プロジェクトディレクターのP. ヴィーラムトゥベル氏は、「打ち上げ
から着陸に至るまで、ミッション全体の運用は予定通りに完璧に行われた」と語りました。
インドの探査船着陸の成功は、ロシアのルナ25号が月の南極近くに着陸しようとして失敗し
月面に衝突した4日後のことでした。チャンドラヤーン 3 号は、太陰暦の 1 日、つまり 2
週間稼働するように設計されています。
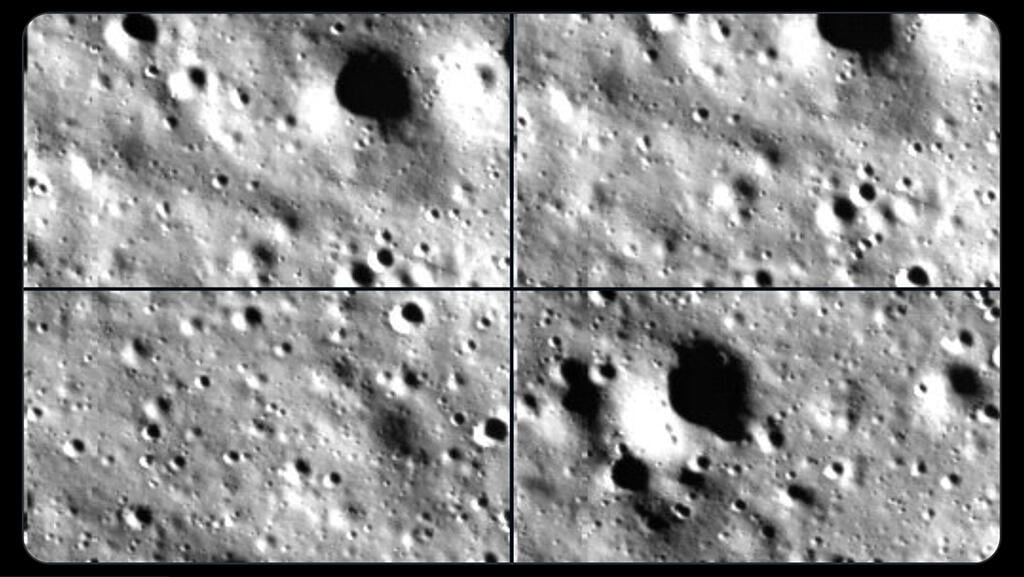
チャンドラヤーン3号の降下中に撮影された月面の画像(画像:インド宇宙研究機構)
ロシア、ルナ25号の墜落

ロシアのルナ25号月探査機(画像:NASA)
ロシアによるほぼ50年ぶりの月探査機ルナ25号が月面に墜落したとロスコスモス宇宙社が
8月20日に発表しました。ロスコスモス社は、ロシア連邦における宇宙開発全般を担当する
国営企業です。
このミッションは8月10日、ロシアのソユーズ2号フレガットロケットに搭載された1,800kg
(4,000ポンド)の宇宙船をボストーチヌイ宇宙基地から打ち上げることから始まりました。
5 日間の旅の後、ルナ 25 号は月の周りの高さ 100 km (60 マイル) の極軌道に乗りました。
月の南極のボグスラフスキー・クレーター付近への軟着陸は8月21日に計画されていました。
しかし、ルナ25号が着陸前の楕円軌道への操縦に必要なスラスター(推進装置)のスイッチ
を入れた後、8月19日にルナ25号との交信が失われました。
ロシアの宇宙産業関係者によると、スラスターは計画より長く発射されたといいます。
これにより探査機は明らかに、月面から18キロメートル近くまで到達するはずだった予定
の軌道飛行経路を下回り、墜落につながったとみられます。
ロスコスモスによれば、この事故は省庁間の特別委員会によって調査される予定です。
ルナ 25 号は、計画されている 1 年間のミッション中に、極地における水氷堆積物の存在
を確認し、月の外気圏を探査するために月の土壌を研究することが期待されていました。
ロシアの月への帰還に続いて、2027 年から 2030 年の間にルナ 26 号、ルナ 27 号、
ルナ 28 号というさらにいくつかのミッションが発表される予定でした。
ロシアの宇宙専門家ヴィタリー・エゴロフ氏によると、ルナ25号の墜落後に計画が中止
される可能性は低いが、ロシアの現在の厳しい経済環境ではモスクワの優先リストから外
れるだろうということです。同氏はまた、今回の墜落は月探査計画におけるロシアの中国
との協力に悪影響を及ぼし、ロシアは従属的な立場にとどまると予想しています。
日本とインドのLUPEXプロジェクト
月極域探査ミッション(LUPEX)
近年、観測データの解析結果から月極域に水の存在可能性が示唆されています.JAXAでは
月の水資源が将来の持続的な宇宙探査活動に利用可能か判断するために、水の量と質に関
するデータを取得することを目的とした、インド宇宙研究機関(ISRO)との国際協働ミッ
ションを計画しています。
量を調べる:既存の観測データから水の存在が予想されている地点において、その場観測に
より水(H₂O)の量に関する実際のデータ(グラウンドトルースデータ)を取得。
質を調べる:月極域におけるその場観測によって水の分布、状態、形態等を明らかにするこ
とです。
また、このミッションでは、将来の月面活動に必要な「移動」「越夜」「掘削」等の重力天
体表面探査に関する技術の獲得も目指しています。
月の北極や南極では太陽高度が低いため、クレータの内部などの周囲より低い場所に長い
時間日の当たらない「永久影」と呼ばれる領域が存在します。
これらの場所では、水が昇華せずに月表面近くに残っている可能性が高いことがこれまで
の観測データにより分かってきました。しかし、水の具体的な量や分布、またどのような
形態で存在しているかはまだ謎のままです。
このミッションでは、水の存在有無を確認するだけでなく、水がどれだけの量、どのよう
な分布で、どのような状態で存在するのかを調べます。
また、月の環境との関係を知ることにより、どのようにして今の状態になったかを解明す
るための知見を得ることも目的としています。
国際協働プロジェクトとして、JAXAが月面を走るローバ(探査車)を、インド宇宙研究
機関(以下、ISRO)がローバを運ぶ着陸機を担当。NASAや欧州宇宙機関(ESA)の観
測機器もローバに搭載されます。
日本が開発するローバー
JAXAが開発しているローバは、自走して水がありそうな地域を探し、ドリルで地面を掘
って土壌をサンプリング。採取したサンプルをローバに搭載した観測機器で詳細に分析し、
データを取得する計画になっています。
今回ローバに使っている、レゴリス(月の砂)の含水率を測る機器、掘削およびサンプル
採取をする機器、その他、走行系やバッテリー部分には、世界初や世界最高水準の技術も
あります。それらの機器を積んだ数百㎏級のローバを月に運んで動かすこと、そして、採
取したサンプルをその場で計測するという挑戦的なプロジェクトです。
ISROは月の周回衛星の運用や月着陸機の開発を行うなど、高い技術力を持っています。
LUPEXプロジェクトではISROが今まで開発してきた月面ローバよりも一回り大きなロー
バを作る予定です。
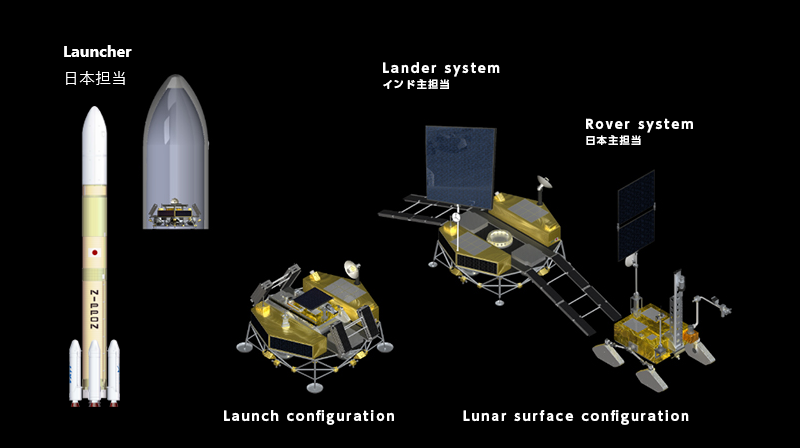
LUPEXプロジェクト概要(画像:JAXA)
LUPEXは、日本製のロケットと探査機、インド製の着陸機に依存。ロケットは、JAXAと
日本の3大航空宇宙企業である三菱重工業(MHI)、川崎重工業(KHI)、IHI(旧石川島
播磨重工業)が開発した新型H3ロケットを使用します。探査機はJAXAとMHIによって開
発されています。
明日、日本のSLIM打ち上げ
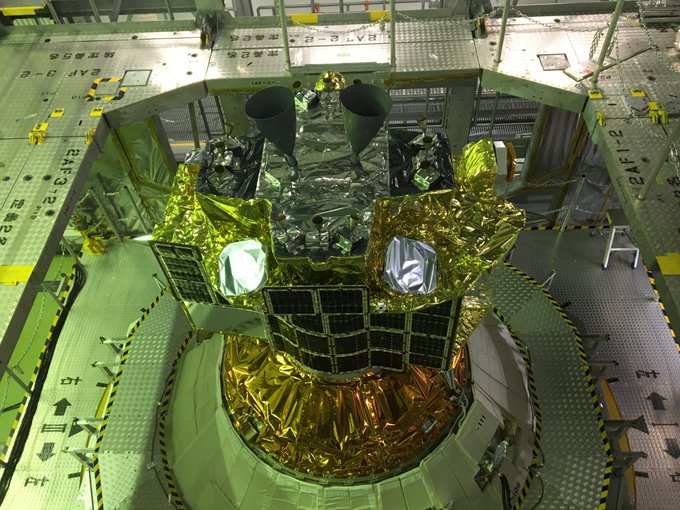
明日28日に延期となったSLIM計画(画像:JAXA)
SLIM (Smart Lander for Investigating Moon) プロジェクトは、将来の月惑星探査
に必要な高精度着陸技術を小型探査機で実証する計画です。この技術を実証することで、
我々人類が進める重力天体探査は、従来の「降りやすいところに降りる」探査ではなく、
「降りたいところに降りる」探査へと非常に大きな転換を果たすことになります。
SLIMのような小型探査機による着陸実証は世界的にもユニークです。SLIMプロジェクト
を実現することで、月よりも重量リソース制約の厳しい惑星への着陸も現実のものとなっ
てきます。また、将来月面からのサンプルリターンを実施する場合、月面からSLIM級の
大きさのリターン機を打ち上げれば、はやぶさ等と同程度の大きさのカプセルを地球に
送り返すことができるようになると考えています。
SLIMプロジェクトは、JAXA宇宙科学研究所のメンバーを中心としつつ、全国の大学等の
研究者が集まり、一体となって検討・開発を進めています。
SLIMは、具体的には以下の二つの目的を達成することで、将来の月惑星探査に貢献する
ことを目指しています。
- 小型の探査機によって、月への高精度着陸技術の実証
- 従来より軽量な月惑星探査機システムを実現し、月惑星探査の高頻度化
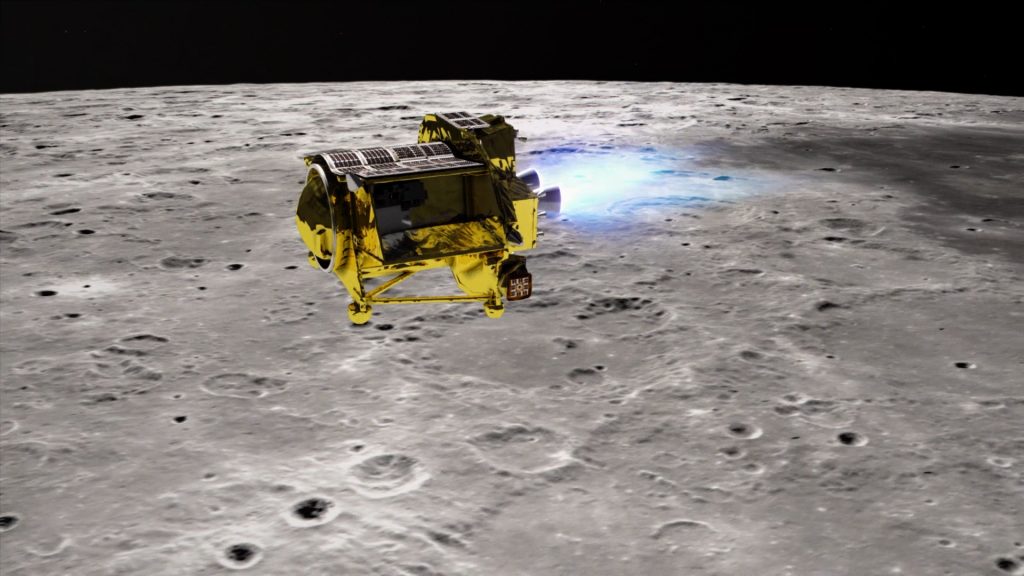
月面上空を航行するSLIM、想像図(画像:JAXA)
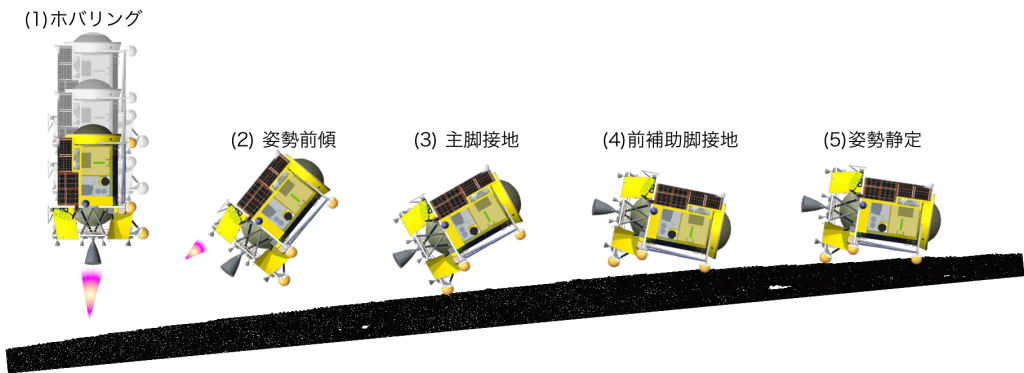
SLIMの2段階着地(画像:JAXA)
まとめ
世界でも日本でも、宇宙や月にロケット、探査機などを積極的に打ち上げています。
今回のSLIMの打ち上げには、H2ロケットが使われます。ここのところのH3ロケ
ットの打ち上げ失敗が残念です。
JAXAでは、H-2Aロケット47号機の打上げの模様をライブ中継する予定です。
(番組開始予定:8月28日(月)午前8:55)
今度は、打ち上げの成功をお祈りしています。
それでは今日はこの辺で・・・
またお会いできる日を楽しみにしています。


コメント