
皆さんこんにちは!
静かな超音速ジェット機の開発が着々と進んでいます。
ロッキード・マーティン社が製造したX-59、ハーミアスのMk 2.1、ライバル同士がしのぎを削って開発の速度を加速しています。
NASAのX-59

NASAの静粛超音速研究機X-59は10月28日、カリフォルニア州パームデールの米空軍第42工場から離陸し、1時間7分の初飛行を開始した。クレジット: カーラ・トーマス/NASA
X-59 低ブーム実証機は、ここ一世代で飛行する最初の有人 NASA X-プレーンであり、
1960 年代の X-15 以来初の米国製の有人高速研究用専用航空機であり、NASA の 21 世紀航空学の旗艦機です。
独特な形状をしたX-59は、陸上や海上のどこでも超音速飛行を可能にするのに役立つ実際の
音響データを収集することを目的として、何年もかけて開発されてきたが、第2四半期に
エンベロープ拡張飛行が再開されれば、南カリフォルニアの上空ですぐによく見られるようになるだろう。
NASAの設計に基づきロッキード・マーティン社が製造したX-59研究機は、10月28日に
飛行試験を開始しました。プロジェクトの主任パイロットであるニルス・ラーソン氏が、
カリフォルニア州パームデールにあるロッキード社のスカンクワークス施設から近くの
エドワーズ空軍基地まで、ニードルノーズ設計のX-59を飛行させました。飛行後の徹底的な
点検といくつかの改修を経て、X-59はまもなく空へ舞い戻ります。
「ようやくスタートラインに立ったと言えるでしょう」と、NASAの静かな超音速技術プロ
グラム「クエスト」のミッション統合マネージャー、ピーター・コーエン氏は語ります。
クエストは、X-59を中核とするNASAの超音速技術プログラムだ。「『これならできる』
というアイデアから初飛行まで、約15年という長い道のりでした」
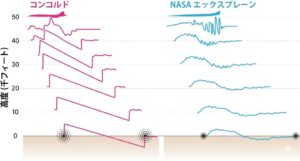
この図は、高度が下がるにつれて、コンコルド(ピンク)のソニックブームが鋭い衝撃波を伴うN波に収束し、地面到達時には非常に大きな圧力スパイク(ピンクの波形)を発生させる様子を示しています。一方、NASAのエックスプレーン(青)は、ソニックブームを意図的に「整形」することで、N波への収束を遅らせ、地面到達時にも振幅が小さく、より「穏やか」な圧力波(青い波形)に抑えていることがわかります。
X-59の実現を導いたコーエン氏によると、高速Xプレーンのルーツは、NASAがN+2および
N+3先進航空機コンセプト研究を開始した2008年に遡るという。この構想では、将来の
亜音速旅客機の燃料消費量、騒音、排出量を削減するという長期目標が示されたが、低騒音の超音速商用輸送機の研究も含まれていたのです。
2009年にボーイング社とロッキード・マーティン社に研究契約が締結され、NASAは翌年
11月にN+2超音速商用輸送機の実験システム検証の一環として超音速研究試験を開始しま
した。その目的は、両社が製造した小型超音速模型から、ブームに関連するデータを収集することでした。
ボーイングとロッキードのフェーズ I コンセプトの初期テストは、2010 年後半に NASA
エイムズ研究センターの 9 x 7 フィートの超音速風洞で、2012 年後半にはグレン研究
センターの 8 x 6 フィートの超音速風洞で実施されました。ブームの特性と空気力学を改善
したフェーズ II の改良設計のテストは、2013 年までエイムズとグレンで継続され、エンジン ナセルと機体全体の統合に重点が置かれました。
風洞実験により、低衝撃波の旅客機設計を実現するにはエンジンの配置が鍵となることが
確認されました。従来の翼下位置にエンジンを搭載した試験では、翼形状を慎重に調整する
ことで超音速衝撃波を拡散できることが示されました。しかし、翼上にエンジンを搭載した
設計では、衝撃波が上向きに向かい、地上シグネチャに影響を与えませんでした。ただし
翼上へのエンジン搭載は性能低下の可能性があるという注意点もありました。
しかし、低ブームの可能性と、エンジンと機体の異例の空力構成の両方について、風洞実験
の結果は驚くほど有望だったとコーエン氏は振り返ります。「そこで私たちは、『そうだ、
このブーム低減のアプローチは、実は旅客機にも使えるんだ』と気づいたんです」と。
その後のプログラム検討会議で、当時NASA航空研究ミッション局の副次官だったトム・
アーバイン氏がコーエン氏に次のステップは何かと尋ねました。「このまま作業を続け、
改良していくか、それとも飛ばすかだ」と彼は言ったのを覚えている。「トムは『それは
なかなか良い答えだ』と言いました。それがXプレーン構想の始まりだった」
Xプレーン計画は当初、米国行政管理予算局(OMB)から冷ややかな反応しか得られなかっ
たものの、2008年から2019年までNASA航空研究次官を務めたジェイウォン・シン氏の
継続的な支援により、計画は存続することになりました。「私たちはコンセプトを改良し
続け、その後、国際民間航空機関(ICAO)との協力を始めました」とコーエン氏は語
ります。「そこでようやく、『この飛行機を使えば、技術の実証だけでなく、地域社会の
反応に関するデータを収集できる』という考えが固まりました。そしてOMBが賛同してくれたのです」
新型Xプレーン計画の初期設計の詳細は、2016年2月にNASAが低衝撃実証機の予備設計
契約をロッキード・マーティン社とエンジンプロバイダーのGEエアロスペース社に2,000万
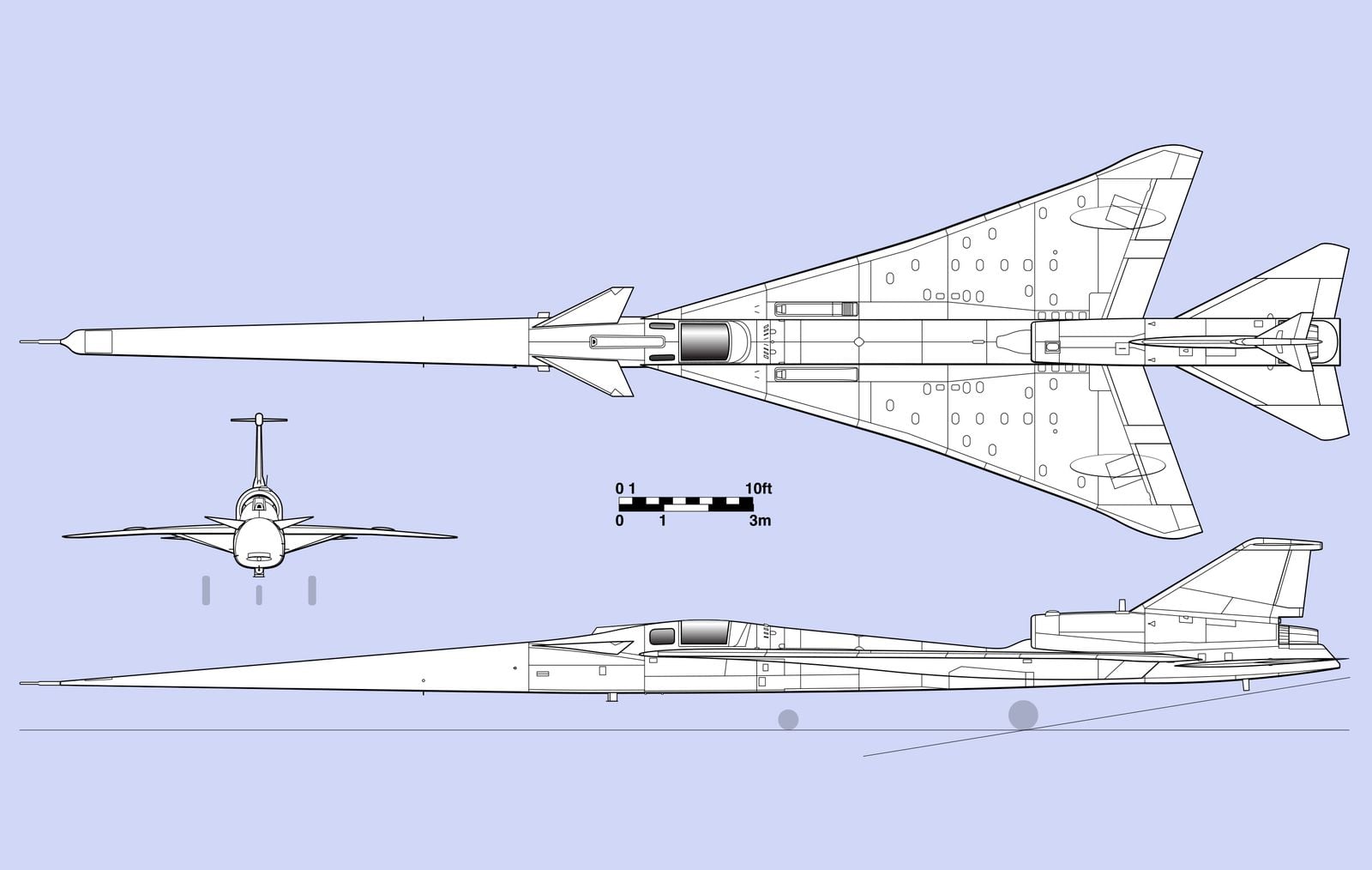
ドルで発注したことで明らかになりました。この風変わりな外観の機体は、機首衝撃を
緩和するための長い機首が特徴で、前翼とエンジン吸気口は、鋭角ながらも微妙な形状の
デルタ翼の上に設置され、遮蔽効果を発揮した。また、フィン上部に小さな水平面で構成
されたT字型尾翼が衝撃を緩和し、細身の胴体後端には揚力尾翼が取り付けられていました。
2016年に登場したこの機体の形状は、5年前のNASAの初期設計とは全く異なっていまし
た。当初は胴体上部に搭載された単発エンジンをV字尾翼に収めたシンプルなデルタ翼で
したが、すぐに設計が変更され、境界層を迂回させるため、中央翼と「バンプ」エンジン
インレットを備えたものへと変更されました。2014年初頭の構想策定段階の終了時には、
V字尾翼は単発の垂直尾翼とシンプルな水平安定板に置き換えられていました。
2014 年 4 月から、X-59 はさらに一連のコンセプト改良サイクルを経て、2015 年 6 月
までに、延長された機首、前翼、傾斜したデルタ翼、安定装置、小型の T 型尾翼を備えた今日の X プレーンとして認識されるようになりました。
「最初の4、5回の設計反復の後は、要件を変更することはありませんでした。機体は基本的
に同じでした」とコーエン氏は語りました。「Xプレーンをもう一度どう作るかを考える
だけでした。」2017年6月の予備設計審査を経て、2018年4月にロッキード・マーティン社
に機体製造の契約が締結され、詳細設計段階が開始された。C612と名付けられた最終的な
外観構成は、2019年9月の最終設計審査の頃に決定されました。
この機体は、75PLdB(知覚レベルデシベル)の正弦波状のソニックブームを発生するよう
に特別に設計されており、これは約6メートル離れた場所で車のドアを閉める音とほぼ
同等です。これは、コンコルドのN波「ダブルバン」が発する105PLdBの音(車内でドアを閉める音に相当)とは対照的です。
デシベルの尺度は線形ではなく対数であるため、コンコルドと X-59 の予想される爆風の
強さの差は、NASA が小型超音速旅客機を公的に受け入れられるものにできると考えている約 20 倍の減少を表しています。
Xプレーンの真の任務は、人口密集地の上空を飛行し、低音、特に衝撃波が振動を引き起こ
す可能性のある屋内における低音に対する地域社会の反応に関するデータを収集することか
ら始まります。データはFAA(連邦航空局)とICAO(国際民間航空機関)に提供され、経済
的な商業運航の前提条件とされる陸上超音速飛行の解禁の判断材料となります。

NASAは、ドナルド・トランプ大統領が2025年6月にFAA(連邦航空局)に対し、長年禁止
されてきた陸上超音速飛行の解除を命じる大統領令を発令したにもかかわらず、低音爆風
ミッションの重要性は依然として高いと述べています。「FAAは依然としてICAOとの協力
に尽力しています。なぜなら、彼らも米国単独では実現不可能だと考えているからです」
とコーエン氏は語ります。「真に世界的な航空機を望むなら、世界的なルールが必要です。」
当初、NASAは2024年に上空飛行を開始し、2028年の航空環境保護委員会(CAEP)の
ブーム基準策定会議に間に合うようにICAOに騒音データを提供する予定でした。しかし
当初2022年に予定されていた飛行試験の開始が遅れたため、この目標は2030年のCAEP/15会議まで延期されました。
COVID-19パンデミックといった大きな出来事が航空機開発の妨げとなった一方で、
NASAとロッキード・マーティンは、部品とシステムの統合と試験が予想以上に困難であっ
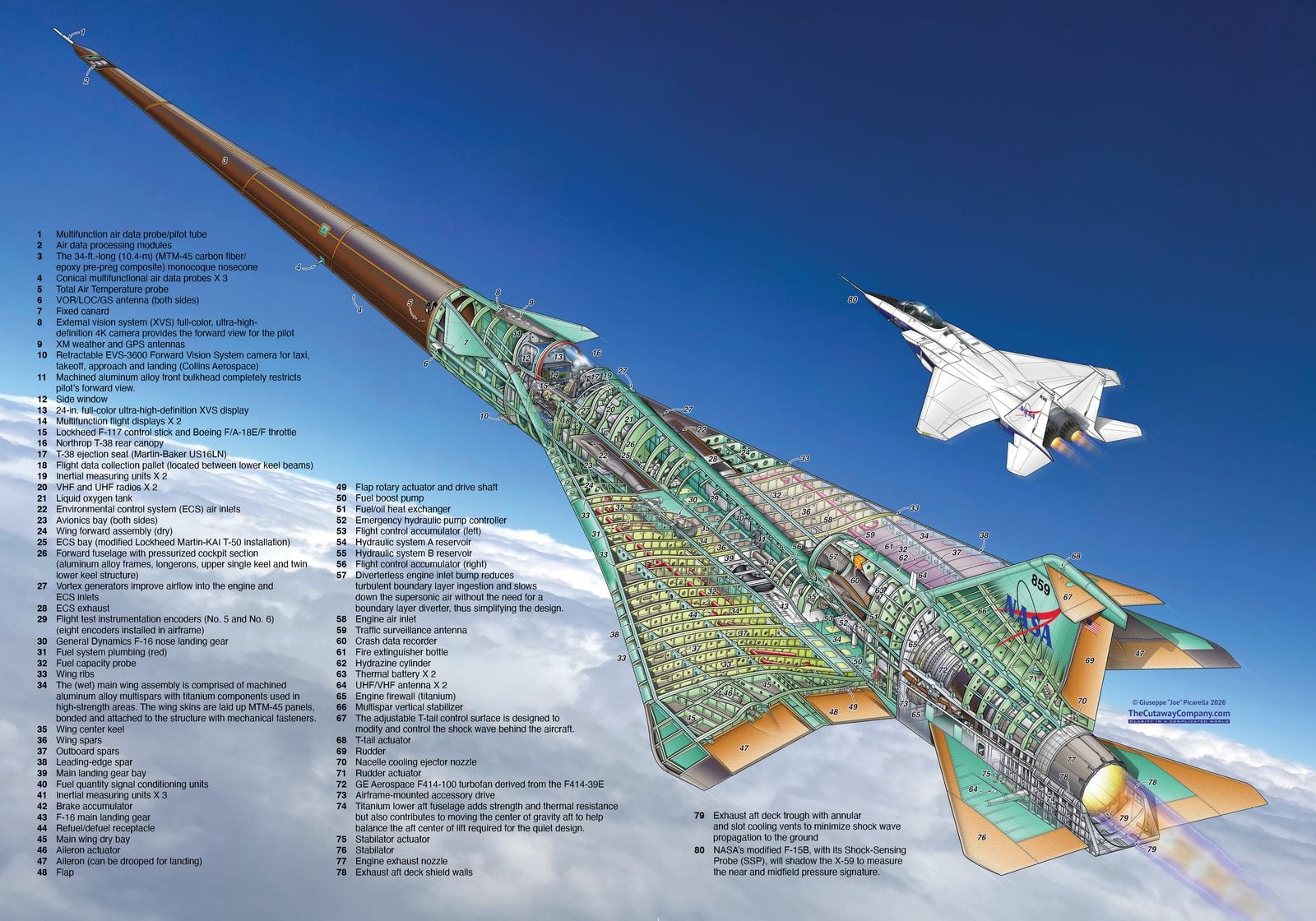
たことを認めています。これは、様々な戦闘機の既製部品を統合するというコスト削減策が
一因となっており、これらはすべて統合する必要がありました。これには、ロッキード・
マーティンF-16の主脚と前脚、ロッキード・マーティンF-117の操縦桿、ボーイング
F/A-18E/Fのスロットルコントロール、ノースロップT-38の後部キャノピーと射出座席が含まれます。
「Xプレーンは昔とは違います」とコーエン氏。「例えば、かつてはノースロップF-5の着陸
装置は取り外すことができ、車輪と車軸だけでした。しかし今では、F-16の着陸装置には
追加のセンサーと速度制御装置が搭載されています。はるかに複雑になっています。しかも
F-16の着陸装置の設計は1970年代後半に遡り、そのデータはどこにあるのでしょうか?
さらに、F-16の着陸装置をF-117の操縦桿など他のシステムと連携させる必要があります。これらすべてを連携させるには時間がかかります。
「今にして思えば、F-16から全部流用して、そのまま使えるようにした方が良かったかもし
れません」とコーエン氏は続け、複雑な飛行試験計器システムも大きな統合作業だったと
指摘する。「チームには多くの課題があり、問題も抱えていましたが、その間ずっとロッキードとは良好な協力関係を築いてきました。」


コメント